In this example we will connect a MMA8452Q accelerometer to a Raspberry Pi
Lets look at some information about the sensor
The MMA8452Q is a smart, low-power, three-axis, capacitive, micromachined accelerometer with 12 bits of resolution. This accelerometer is packed with embedded functions with flexible user programmable options, configurable to two interrupt pins. Embedded interrupt functions allow for overall power savings relieving the host processor from continuously polling data.
The MMA8452Q has user selectable full scales of ±2 g/±4 g/±8 g with high-pass filtered data as well as non-filtered data available real-time. The device can be configured to generate inertial wakeup interrupt signals from any combination of the configurable embedded functions allowing the MMA8452Q to monitor events and remain in a low-power mode during periods of inactivity
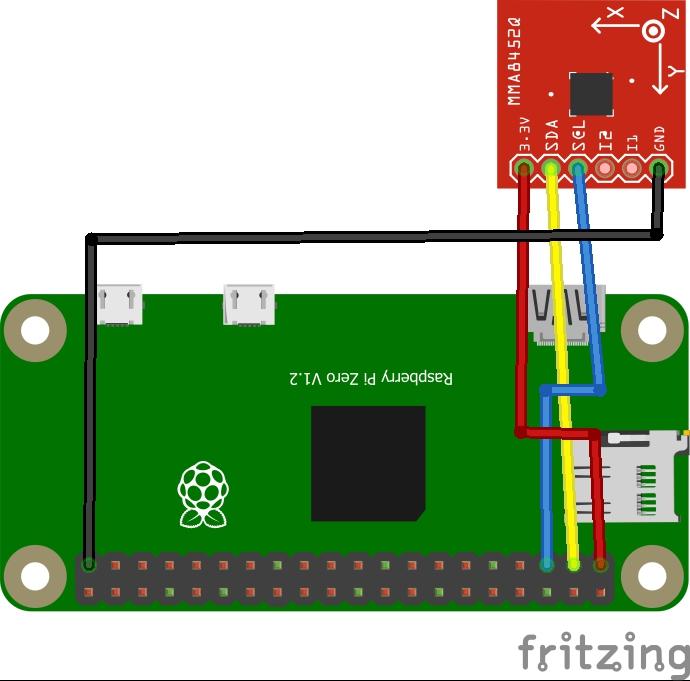
Connection
Here is a layout, its an easy device to connect
{kind=link}
Parts List
Here are the parts I used
Code
As you can see this is a controleverything example called MMA8452Q.py
[codesyntax lang=”python”]
# Distributed with a free-will license.
# Use it any way you want, profit or free, provided it fits in the licenses of its associated works.
# MMA8452Q
# This code is designed to work with the MMA8452Q_I2CS I2C Mini Module available from ControlEverything.com.
# https://www.controleverything.com/content/Accelorometer?sku=MMA8452Q_I2CS#tabs-0-product_tabset-2
import smbus
import time
# Get I2C bus
bus = smbus.SMBus(1)
# I2C address of the device
MMA8452Q_DEFAULT_ADDRESS = 0x1C
# MMA8452Q Register Map
MMA8452Q_REG_STATUS = 0x00 # Data status Register
MMA8452Q_REG_OUT_X_MSB = 0x01 # Output Value X MSB
MMA8452Q_REG_OUT_X_LSB = 0x02 # Output Value X LSB
MMA8452Q_REG_OUT_Y_MSB = 0x03 # Output Value Y MSB
MMA8452Q_REG_OUT_Y_LSB = 0x04 # Output Value Y LSB
MMA8452Q_REG_OUT_Z_MSB = 0x05 # Output Value Z MSB
MMA8452Q_REG_OUT_Z_LSB = 0x06 # Output Value Z LSB
MMA8452Q_REG_SYSMOD = 0x0B # System mode Register
MMA8452Q_REG_INT_SOURCE = 0x0C # System Interrupt Status Register
MMA8452Q_REG_WHO_AM_I = 0x0D # Device ID Register
MMA8452Q_REG_XYZ_DATA_CFG = 0x0E # Data Configuration Register
MMA8452Q_REG_CTRL_REG1 = 0x2A # Control Register 1
MMA8452Q_REG_CTRL_REG2 = 0x2B # Control Register 2
MMA8452Q_REG_CTRL_REG3 = 0x2C # Control Register 3
MMA8452Q_REG_CTRL_REG4 = 0x2D # Control Register 4
MMA8452Q_REG_CTRL_REG5 = 0x2E # Control Register 5
# MMA8452Q Data Configuration Register
MMA8452Q_DATA_CFG_HPF_OUT = 0x10 # Output Data High-Pass Filtered
MMA8452Q_DATA_CFG_FS_2 = 0x00 # Full-Scale Range = 2g
MMA8452Q_DATA_CFG_FS_4 = 0x01 # Full-Scale Range = 4g
MMA8452Q_DATA_CFG_FS_8 = 0x02 # Full-Scale Range = 8g
# MMA8452Q Control Register 1
MMA8452Q_ASLP_RATE_50 = 0x00 # Sleep mode rate = 50Hz
MMA8452Q_ASLP_RATE_12_5 = 0x40 # Sleep mode rate = 12.5Hz
MMA8452Q_ASLP_RATE_6_25 = 0x80 # Sleep mode rate = 6.25Hz
MMA8452Q_ASLP_RATE_1_56 = 0xC0 # Sleep mode rate = 1.56Hz
MMA8452Q_ODR_800 = 0x00 # Output Data Rate = 800Hz
MMA8452Q_ODR_400 = 0x08 # Output Data Rate = 400Hz
MMA8452Q_ODR_200 = 0x10 # Output Data Rate = 200Hz
MMA8452Q_ODR_100 = 0x18 # Output Data Rate = 100Hz
MMA8452Q_ODR_50 = 0x20 # Output Data Rate = 50Hz
MMA8452Q_ODR_12_5 = 0x28 # Output Data Rate = 12.5Hz
MMA8452Q_ODR_6_25 = 0x30 # Output Data Rate = 6.25Hz
MMA8452Q_ODR_1_56 = 0x38 # Output Data Rate = 1_56Hz
MMA8452Q_MODE_NORMAL = 0x00 # Normal Mode
MMA8452Q_MODE_REDUCED_NOISE = 0x04 # Reduced Noise Mode
MMA8452Q_MODE_FAST_READ = 0x02 # Fast Read Mode
MMA8452Q_MODE_ACTIVE = 0x01 # Active Mode
MMA8452Q_MODE_STANDBY = 0x00 # Standby Mode
class MMA8452Q():
def __init__(self):
self.mode_configuration()
self.data_configuration()
def mode_configuration(self):
“””Select the Control Register-1 configuration of the accelerometer from the given provided values”””
MODE_CONFIG = (MMA8452Q_ODR_800 | MMA8452Q_MODE_NORMAL | MMA8452Q_MODE_ACTIVE)
bus.write_byte_data(MMA8452Q_DEFAULT_ADDRESS, MMA8452Q_REG_CTRL_REG1, MODE_CONFIG)
def data_configuration(self):
“””Select the Data Configuration Register configuration of the accelerometer from the given provided values”””
DATA_CONFIG = (MMA8452Q_DATA_CFG_FS_2)
bus.write_byte_data(MMA8452Q_DEFAULT_ADDRESS, MMA8452Q_REG_XYZ_DATA_CFG, DATA_CONFIG)
def read_accl(self):
“””Read data back from MMA8452Q_REG_STATUS(0x00), 7 bytes
Status register, X-Axis MSB, X-Axis LSB, Y-Axis MSB, Y-Axis LSB, Z-Axis MSB, Z-Axis LSB”””
data = bus.read_i2c_block_data(MMA8452Q_DEFAULT_ADDRESS, MMA8452Q_REG_STATUS, 7)
# Convert the data
xAccl = (data[1] * 256 + data[2]) / 16
if xAccl > 2047 :
xAccl -= 4096
yAccl = (data[3] * 256 + data[4]) / 16
if yAccl > 2047 :
yAccl -= 4096
zAccl = (data[5] * 256 + data[6]) / 16
if zAccl > 2047 :
zAccl -= 4096
return {‘x’ : xAccl, ‘y’ : yAccl, ‘z’ : zAccl}
from MMA8452Q import MMA8452Q
mma8452q = MMA8452Q()
while True :
mma8452q.mode_configuration()
mma8452q.data_configuration()
time.sleep(0.5)
accl = mma8452q.read_accl()
print “Acceleration in X-Axis : %d”%(accl[‘x’])
print “Acceleration in Y-Axis : %d”%(accl[‘y’])
print “Acceleration in Z-Axis : %d”%(accl[‘z’])
print ” ************************************* ”
time.sleep(0.5)
[/codesyntax]
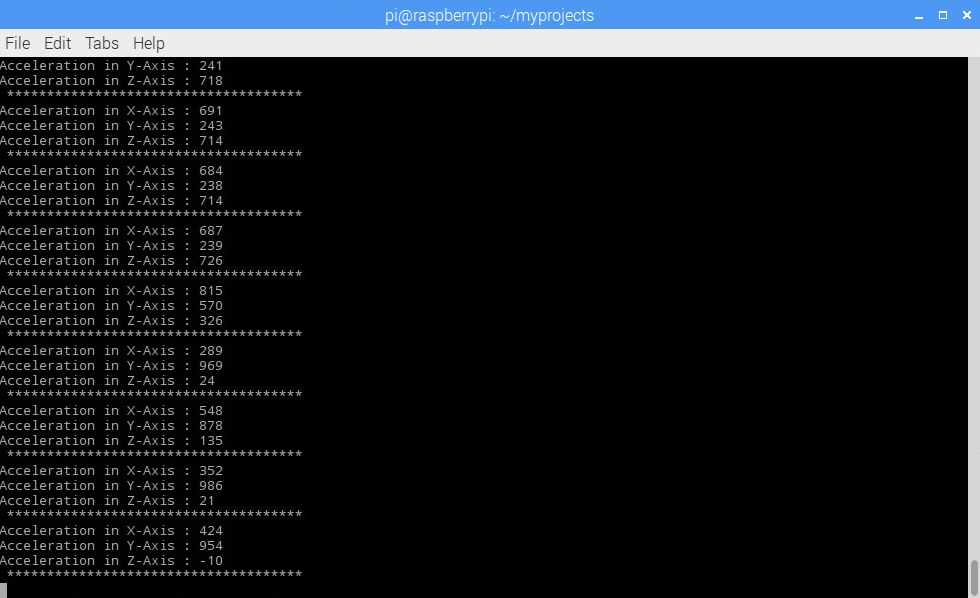
Output
Run with sudo python MMA8452Q.py
{kind=link}