


The MPU-6050 devices combine a 3-axis gyroscope and a 3-axis accelerometer on the same silicon die, together with an onboard Digital Motion Processor™ (DMP™), which processes complex 6-axis MotionFusion algorithms. The device can access external magnetometers or other sensors through an auxiliary master I²C bus, allowing the devices to gather a full set of sensor data without intervention from the system processor.
For precision tracking of both fast and slow motions, the parts feature a user-programmable gyro full-scale range of ±250, ±500, ±1000, and ±2000 °/sec (dps), and a user-programmable accelerometer full-scale range of ±2g, ±4g, ±8g, and ±16g. Additional features include an embedded temperature sensor and an on-chip oscillator with ±1% variation over the operating temperature range.
I bought a module called the GY511 – link later – which contained this sensor, a bmp180 and a HMC5883L sensor in one
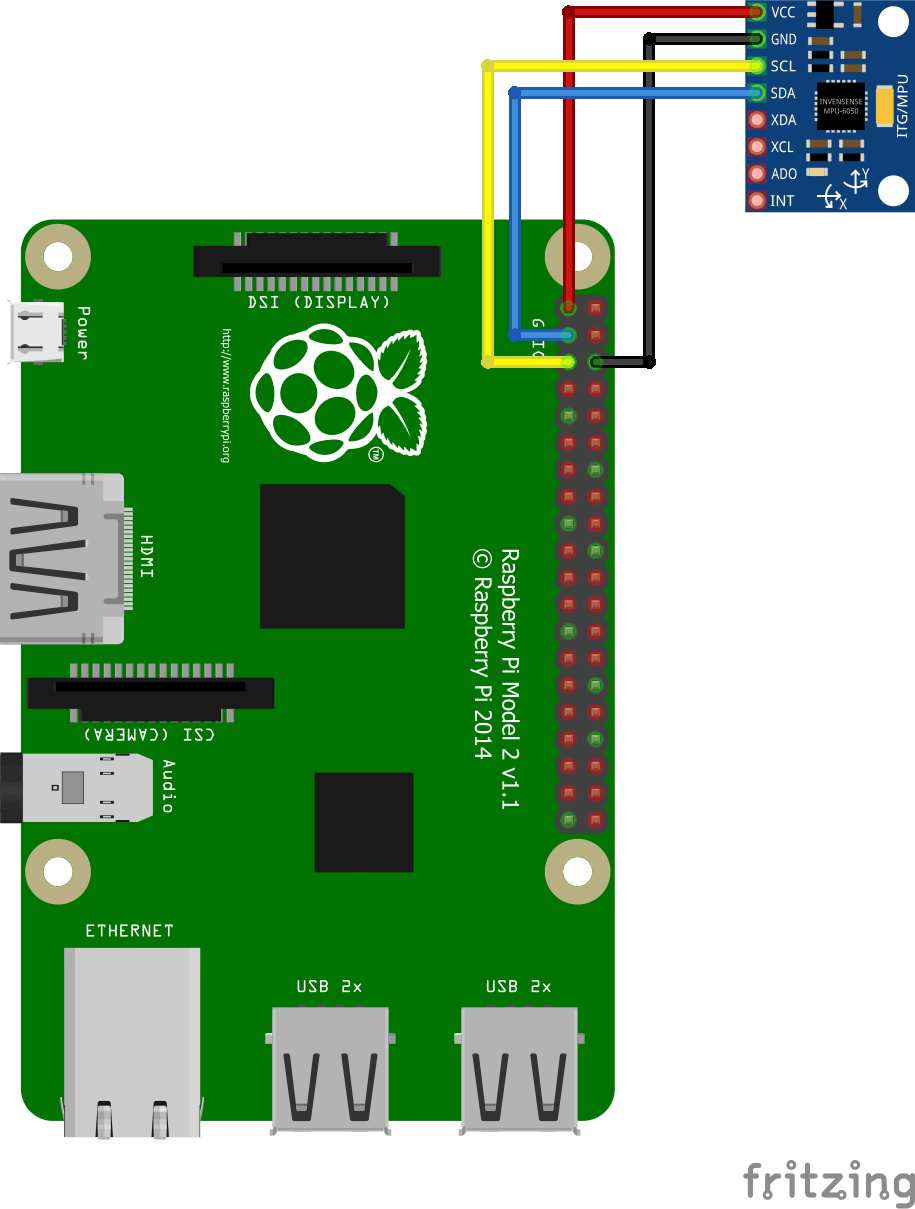
Layout
Code
Here is a c++ example that uses the wiringPi library from https://projects.drogon.net/raspberry-pi/wiringpi/download-and-install/ . Save this as mpu6050a.c
[codesyntax lang=”cpp”]
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include <stdio.h>
#include <math.h>
int fd;
int acclX, acclY, acclZ;
int gyroX, gyroY, gyroZ;
double acclX_scaled, acclY_scaled, acclZ_scaled;
double gyroX_scaled, gyroY_scaled, gyroZ_scaled;
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
double dist(double a, double b)
{
return sqrt((a*a) + (b*b));
}
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
int main()
{
fd = wiringPiI2CSetup (0x68);
wiringPiI2CWriteReg8 (fd,0x6B,0x00);//disable sleep mode
printf("set 0x6B=%X\n",wiringPiI2CReadReg8 (fd,0x6B));
while(1) {
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
delay(100);
}
return 0;
}
[/codesyntax]
Testing
compile the code by running this on the command line
gcc -o mpu6050a mpu6050a.c -lwiringPi -lm
Links
GY-511 LSM303DLHC Module E-Compass 3 Axis Accelerometer + 3 Axis Magnetometer Module Sensor