


The MLX90393 magnetic field sensor can be reprogrammed to different modes and with different settings at run-time. The sensor offers a 16-bit output proportional to the magnetic flux density sensed along the XYZ axes using the Melexis proprietary Triaxis® technology and also offers a temperature output signal. These digital values are available via I2C and SPI, where the MLX90393 is a slave on the bus.
By selecting which axes are to be measured, the raw data can be used as input for further post-processing, such as for joystick applications, rotary knobs, and more complex 3D position sensing applications. Unparallelled performance is achieved with this sensor, which is primarily targeting industrial and consumer applications.
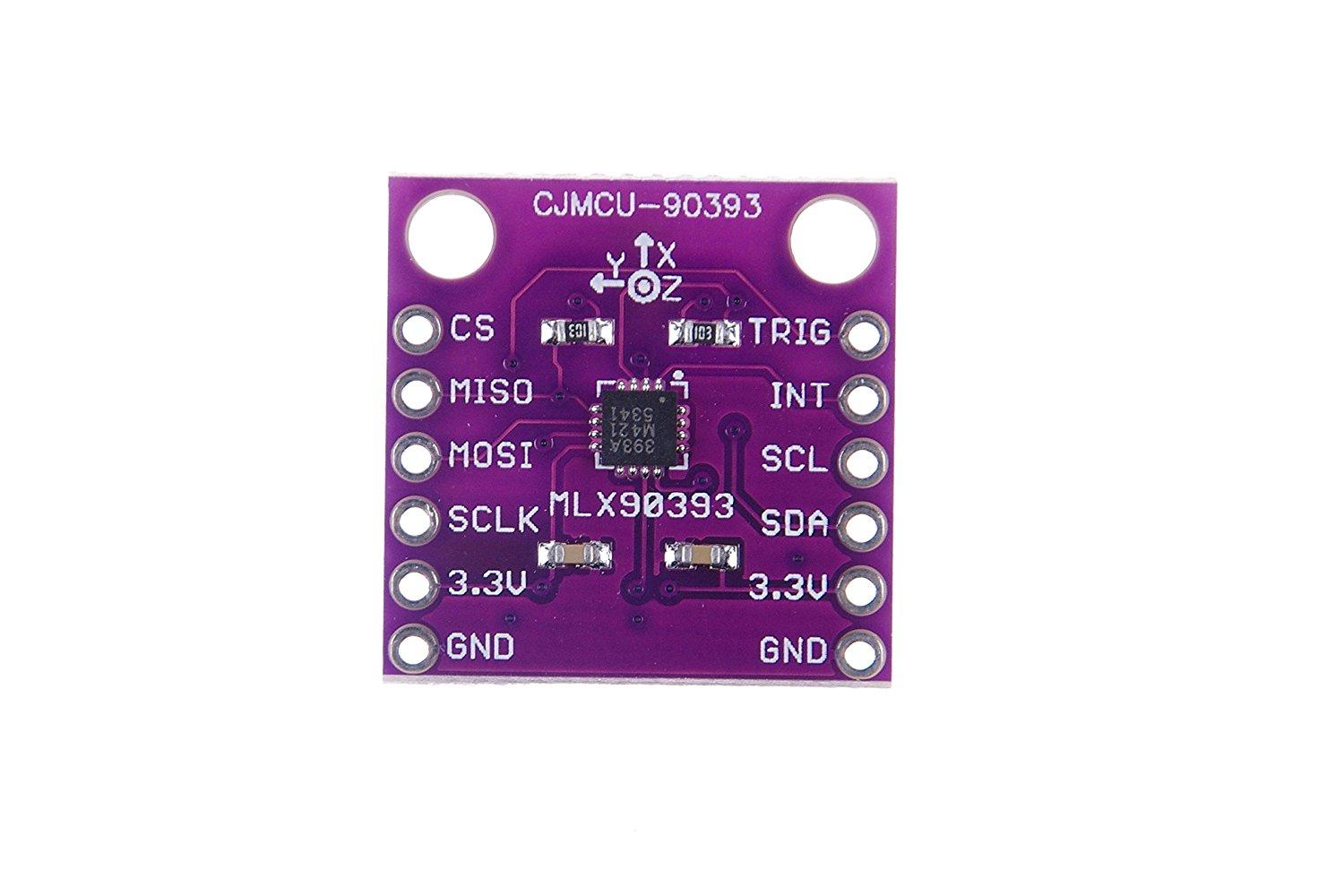
Connection
| Module | Raspberry Pi |
| VDD | 3v3 |
| Gnd | Gnd |
| SDA | Pin 3 – GPIO2 |
| SCL | Pin 5 – GPIO3 |
Code
[codesyntax lang=”python”]
# Distributed with a free-will license.
# Use it any way you want, profit or free, provided it fits in the licenses of its associated works.
# MLX90393
# This code is designed to work with the MLX90393_I2CS I2C Mini Module available from ControlEverything.com.
# https://www.controleverything.com/products
import smbus
import time
# Get I2C bus
bus = smbus.SMBus(1)
# MLX90393 address, 0x0C(12)
# Select write register command, 0x60(96)
# AH = 0x00, AL = 0x5C, GAIN_SEL = 5, Address register (0x00 << 2)
config = [0x00, 0x5C, 0x00]
bus.write_i2c_block_data(0x0C, 0x60, config)
# Read data back, 1 byte
# Status byte
data = bus.read_byte(0x0C)
# MLX90393 address, 0x0C(12)
# Select write register command, 0x60(96)
# AH = 0x02, AL = 0xB4, RES for magnetic measurement = 0, Address register (0x02 << 2)
config = [0x02, 0xB4, 0x08]
bus.write_i2c_block_data(0x0C, 0x60, config)
# Read data back, 1 byte
# Status byte
data = bus.read_byte(0x0C)
# MLX90393 address, 0x0C(12)
# Start single meaurement mode, X, Y, Z-Axis enabled
bus.write_byte(0x0C, 0x3E)
# Read data back, 1 byte
# Status byte
data = bus.read_byte(0x0C)
time.sleep(0.5)
# MLX90393 address, 0x0C(12)
# Read data back from 0x4E(78), 7 bytes
# Status, xMag msb, xMag lsb, yMag msb, yMag lsb, zMag msb, zMag lsb
data = bus.read_i2c_block_data(0x0C, 0x4E, 7)
# Convert the data
xMag = data[1] * 256 + data[2]
if xMag > 32767 :
xMag -= 65536
yMag = data[3] * 256 + data[4]
if yMag > 32767 :
yMag -= 65536
zMag = data[5] * 256 + data[6]
if zMag > 32767 :
zMag -= 65536
# Output data to screen
print “Magnetic Field in X-Axis : %d” %xMag
print “Magnetic Field in Y-Axis : %d” %yMag
print “Magnetic Field in Z-Axis : %d” %zMag
[/codesyntax]
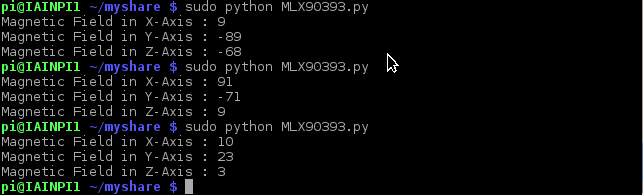
Output
Run the file above in the command line – sudo python MLX90393.py
Links
https://www.melexis.com/-/media/files/documents/datasheets/mlx90393-datasheet-melexis.pdf
CJMCU-90393, MLX90393 digital 3D Holzer sensor, displacement, angle, rotation, 3D position